[tabs]
[tab_item title="Equipe"]
Bruno Quaresma Leonardo - Lattes
Engenheiro de Automação pela Universidade Federal do Rio Grande (FURG)
Cristiano Rafael Steffens - Lattes
Mestre em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Sidnei Carlos da Silva Filho - Lattes
Graduando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Eduardo do Amaral Leivas - Lattes
Graduando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Fernando da Fonseca Schneider - Lattes
Graduando em Engenharia de Automação pela Universidade Federal do Rio Grande (FURG)
Jusoan Lang Mór - Lattes
Mestrando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Marcio Rozante Aguiar - Lattes
Graduando em Engenharia de Automação pela Universidade Federal do Rio Grande (FURG)
Sibyla Andreuchetti Vioto e Silva - Lattes
Graduando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Valquíria Hüttner - Lattes
Graduanda em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Ygor Quadros de Aguiar - Lattes
Graduando em Engenharia de Automação pela Universidade Federal do Rio Grande (FURG)
[/tab_item]
[tab_item title="Descrição do Projeto"]
O projeto busca introduzir melhorias no processo de soldagem através da automação e robotização. Como objetivo geral, busca-se fomentar a colaboração multidisciplinar das equipes envolvidas, resultando na formação de recursos humanos qualificados e com uma visão multifacetada dos grandes desafios atuais da indústria naval e offshore brasileira.O projeto prevê a customização das soluções atualmente utilizadas, bem como o desenvolvimento de novos equipamentos e soluções. Os objetivos específicos do projeto são:
- Estudo do estado-da-arte em robótica para solda de chapas de aço, sobretudo associado aos aspectos de automação e computação voltados a sistemas de percepção e controle em malha fechada;
- Desenvolvimento de projeto de hardware e software para extração de características dimensionais do chanfro e desenvolvimento de robô de solda linear, adaptado a diferentes conformações de cordões de solda;
- Desenvolvimento de sistema de correção de trajetória capaz de realizar operações de soldagem com controle em tempo real e malha fechada, conforme percepção online do processo;
- Teste e validação da ferramenta robótica em campo, em operações de soldagem a serem realizadas no Estaleiro Rio Grande.
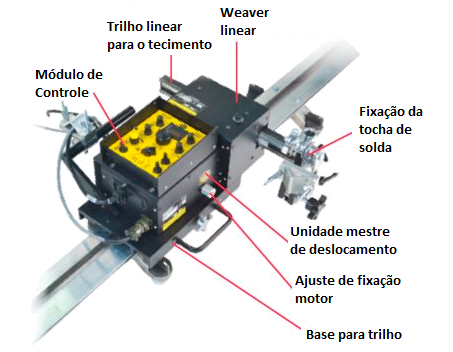
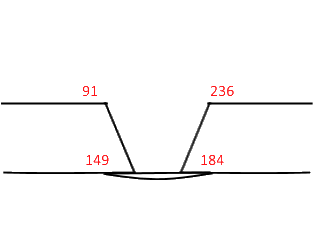
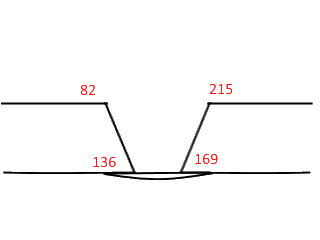
A qualidade da soldagem de arco eléctrico é altamente dependente da parametrização do equipamento. Tensão, corrente, velocidade do trator, posição da tocha, velocidade de alimentação do arame e a movimentação da tocha, entre outros parâmetros, quando não devidamente configurados, podem resultar em deformação da chapa, respingos de solda, escória e fumo. Para minimizar estes problemas, o projeto propõe-se um sistema VBM (Video Based Measurement) para reconhecer a geometria dos chanfros, ajustando automaticamente as configurações corretas para cada operação de soldagem. Usando visão computacional, o sistema estima o volume 3D do chanfro de soldagem, mapeando a geometria do chanfro em atitudes de controle para o processo de soldagem. O sistema é testado e validado no robô Bug-O Matic weaver.
[/tab_item]
[tab_item title="Fotos"]
Interface de controle manual do robô Bug-O Matic Weaver
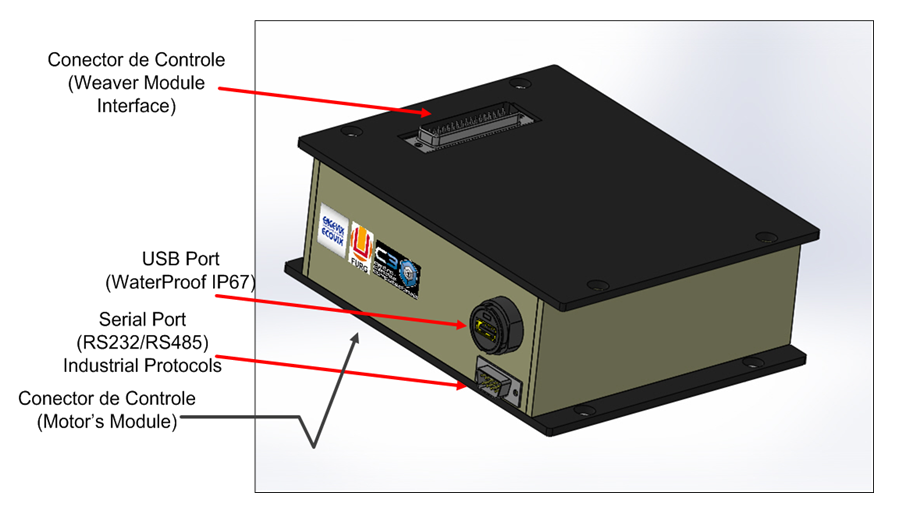
Módulo de controle automatizado do robô
- Imagens Iniciais do robô
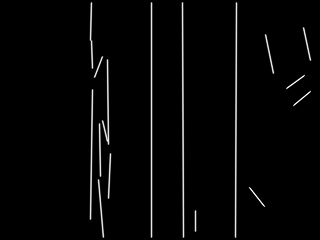
- Imagens processadas
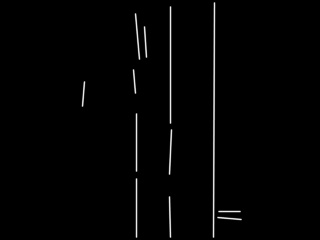
- Resultado dos processamentos nas imagens
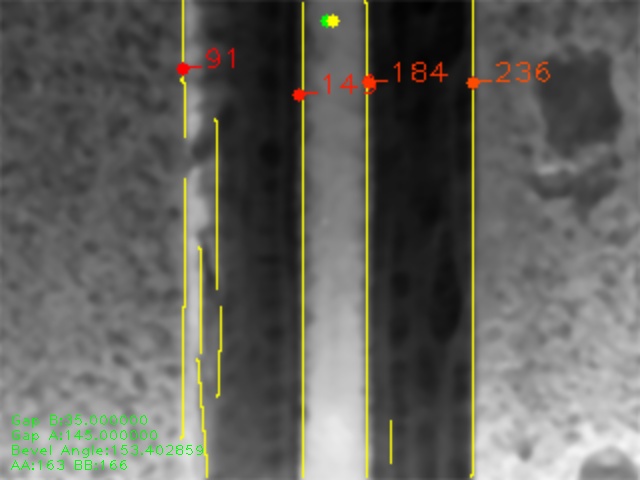
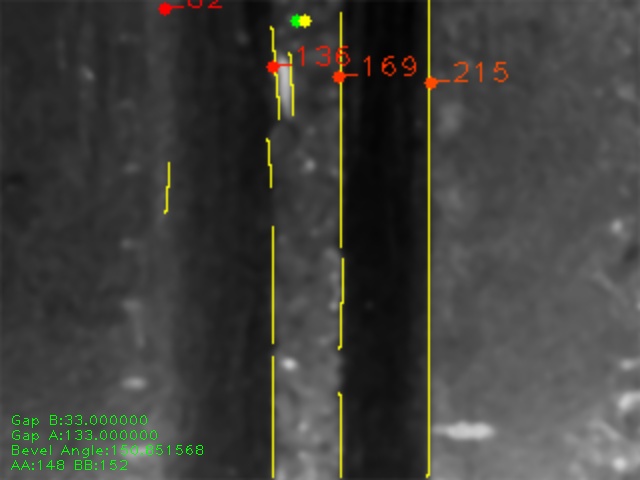
- Resultados dos processamentos
- Estágios iniciais do controle do alimentador de arame e transformador
[/tab_item]
[tab_item title="Trabalhos em anais de congressos"]
Trabalhos completos aceitos em congressos
STEFFENS, C. R.; LEONARDO B. Q.; SILVA, S. d.; HUTTNER, V.; AGUIAR, M. R; LEIVAS, E. d. A.; ROSA, V. S.; BOTELHO, S. S. C. Automated control module based on VBM for shipyard welding applications: Study case on the Bug-O Matic Weaver. In LARS/SBR 2015 I, oct 2015.
STEFFENS, C. R.; LEONARDO B. Q.; SILVA, S. d.; HUTTNER, V.; AGUIAR, M. R; LEIVAS, E. d. A.; ROSA, V. S.; BOTELHO, S. S. C. A VMB System for Intelligent Robotic Welding. In SBAI – Simpósio Brasileiro de Automação Inteligente, 2015.
[/tab_item]
[/tabs]